ROS 机器人仿真系统配置
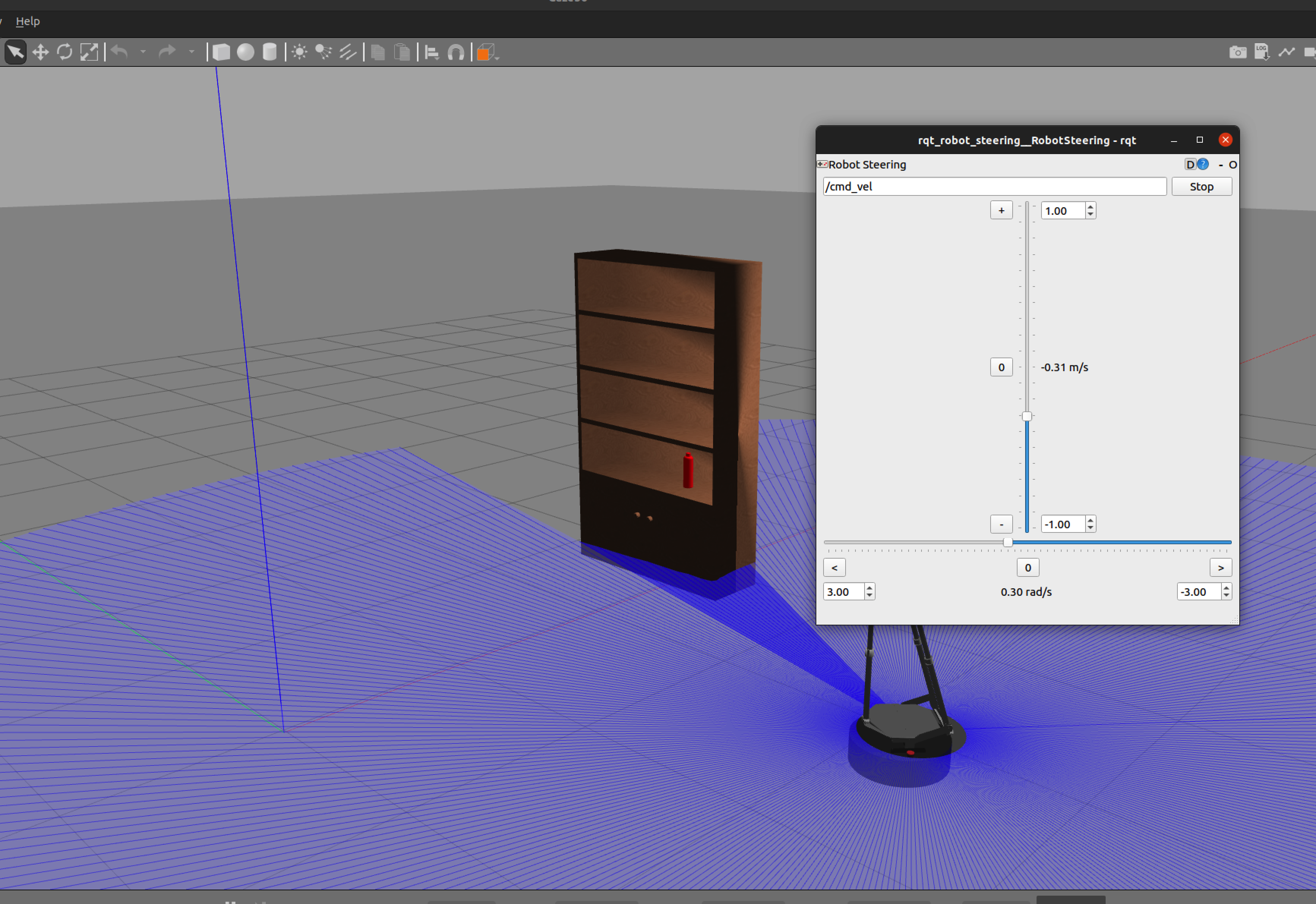
效果
系统环境
Ubuntu 20.04
安装ROS Noetic版
- 配置Ubuntu软件库:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'- 设置keys:
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -- 安装:
sudo apt update
sudo apt install ros-noetic-desktop-full- 初始化rosdep:
sudo rosdep init
rosdep update- 环境配置:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc小乌龟测试
- 首先,需要启动ROS核心:
roscore- 安装并运行rqt_robot_steering:
sudo apt install ros-noetic-rqt-robot-steering
rosrun rqt_robot_steering rqt_robot_steering注意:请确保在新的终端窗口中运行该命令。
- 安装并运行
turtlesim:
sudo apt install ros-noetic-turtlesim
rosrun turtlesim turtlesim_node注意:请在另一个新的终端窗口中运行这个命令。
完成以上步骤后,你应该能看到一个图形化的界面,有一个小乌龟能进行简单的移动。你可以通过rqt_robot_steering来控制小乌龟的运动。
**注意:**每次在新的终端窗口中打开ROS命令前,都需要先输入 source /opt/ros/noetic/setup.bash 来设置好环境,除非你已经将其添加到了 ~/.bashrc 文件中。
从GitHub商店获取ROS项目
- 在你的机器上创建一个工作目录,这里我们假设是
catkin_ws/src。
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
````
2. 在这个目录中,使用`git`命令来克隆你需要的ROS项目。
git clone <您的项目的GitHub链接>
3. 下载项目后,返回`catkin_ws`文件夹,使用 `catkin_make` 进行编译。
```bash
cd ~/catkin_ws
catkin_make如果遇到如下错误,可能是你在构建ROS(机器人操作系统)包时缺少了"move_base_msgs"。
-- Configuring incomplete, errors occurred!
See also "catkin_ws/build/CMakeFiles/CMakeOutput.log".
See also "catkin_ws/build/CMakeFiles/CMakeError.log".
Invoking "cmake" failed安装它,使用以下命令:
sudo apt-get install ros-noetic-move-base-msgs
source /opt/ros/noetic/setup.bash然后尝试再次编译catkin。
- 编译成功后,需要加载新的环境设置,然后你就可以启动你的ROS节点了。
source devel/setup.bash
roslaunch wpr_simulation wpb_simple.launch- 如果你想在GUI中控制你的机器人,你可以运行
rqt_robot_steering:
rosrun rqt_robot_steering rqt_robot_steering许可协议
本文采用 署名-非商业性使用-相同方式共享 4.0 国际 许可协议,转载请注明出处。
分享文章




